| |
- The method of Nelder and Mead (British Computer Journal 7, 1965, 308-313)
is a so called ''derivative free''
method for minimizing functions, using function values only.
Although mathematically incorrect (as shown by McKinnon in SIOPT 1998),
it is the most used from practitioners. This may be due to the fact that
it is of great simplicity and mostly produces good solutions at least in low dimensions.
There exist a lot of modifications of the original method, some aiming
in making it provably mathematically correct. These modifications typically use ingredients of
other methods, like grid search or the principle of sufficient decrease. Here we use
a modification of A. Witzel (PhD dissertation, TUD ,2008) which only uses minimal
changes to the original method.
-
In each step of the method one has a simplex in Rn (the convex hull
of n+1 affinely independent points, for n=2 a triangle) and the
function values at the vertices xi, i=0,...,n, i.e. f(xi) .
The current step aims in computing a new simplex with decreased worst (largest) function value.
This is done by applying a set of replacement rules for the vertices.
For a simplex with vertices xi, i=0,...,n define
- fh = max { f(xj): j=0,...,n },
the largest function value
- H = { i: f(xi) >= fh - εf*ρ },
the index set of ''large'' function values
- L = { 0,...,n}\ H,
the index set of small function values
- fl = min{ f(xi), i=0,...,n },
the smallest function value
- fs = min { f(xi) : i in H },
the smallest function value in the set of large
function values.
εf is a parameter which is fixed in the main cycles of the method
and gets decreased by a fixed factor at the end of such a cycle. A main cycle ends if the
L gets empty.
ρ is the largest length of an edge of the simplex.
Moreover let
xs = 1/|L| Σ i in L xi .
the center of gravity of the vertices with ''small'' function values.
(The main difference to the original method lies in the fact that there H={h} and L={0,..,n}\H.)
One has parameters α >0, γ > 1 , 0 < β < 1 and
0 < δ < 1,
the so called reflection coefficient, the expansion coefficient, the contraction coefficient and the coefficient
of ''massive'' contraction.
The values used by Nelder and Mead and also here are
α = 1 , β = 0.5, γ = 2, δ = 0.5 .
-
If L is empty, then a grid search along the current edges emanating from xl
and grid refinement by the factor δ is done, with the aim of finding a point with function value less than
fh-εf*ρ*δm for
m=0,..., with search in both directions. This is the so called ''symmetric massive contraction'',
''smsc''. (This feature is not present in the original work). If such a point is not found,
then εf and ρ get decreased by a fixed factor. If both these values decrease below a termination
criterion (here 10-14 and 10-15) then the method terminates: the current point
xl will be a stationary point of f (approximately).
Otherwise, the method restarts with recomputing the index sets defined above.
Near a minimizer one always will get such smsc-steps.
Other termination reasons are : Change of fh less than epsfmin, simplex diameter
less than diameps or larger than diammax,
more than maxiter steps to reach normal termination, more than 10 successive small changes in fh.
- If now L is non empty, then all vertices from H get replaced by ''better'' ones,
where ''better'' means nothing more than getting a function value less than fh.
The following operations are provided, which are applied for every point with index in H:
- The reflection step. Define
xr = (1+α) xs - α xi for i in H .
xr lies on the line through xi and xs , the center of gravity point
of the points in L , but opposite to xi. (For n > 2 ''reflection''
is a misnomer, since this is not an unitary transformation then).
Three cases may occur here:
- f(xr) < f(xl) . In this case an ''expansion'' step is performed:
- f(xl) <= f(xr) < f(xs). In this case xh
is replaced by xr and the next (partial) step of the method begins.
- f(xs) <= f(xr). In this case we discern: if
f(xr) < f(xh), then xh is replaced by xr
and afterwards a contraction step is performed (see below). Otherwise this contraction step is done immediately.
For this let
f(xh') = min {f(xr),f(xh) }
- The contraction step: the contraction point xc is
defined by
xc = β xh'+(1-β) xs
β is the relation of the distances ||xc- xs|| and
||xh' - xs||. By definition of h' there holds
xc = β xh +(1-β)xs if f(xr) >= f(xh) (inner contraction
)
resp.
xc = β xr +(1-β)xs if f(xr) < f(xh).
(outer contraction).
If now f(xc) < f(xh), then xh is replaced by xc
and the next (partial) step begins or otherwise a massive contraction is tried.
- The massive contraction. In this case for all i < > l
the points xi get replaced by
xt i = xl +(-) δm (xi-xl)
until all new function values are less than fh.
This massive contraction appears in two situations:
xh is near a saddle point and the reflection moves in a direction of ascent
or the level sets of f are narrow and strongly curved with f(xh)
much larger than all other function values in the simplex.
- The expansion step: this step is done if
f(xr) < f(xl). There is reason for the hope that in the current direction from
xh to xr a further descent is possible. One lets
xe = γ xr+(1-γ) xs
If f(xe) < f(xr), then xh is replaced by xe,
otherwise one replaces xh by xr
and the next (partial) step begins.
- These steps carry the attribute ''partial'' because they are performed for all points with index in
H, whereas in the original method we have always H={h}.
- Hence the effort of this method for each (partial) step is one, two
or at most 2mn new function evaluations, the latter one only in the case of a massive contraction or an
empty set L which are quite seldom situations.
- In the results of this code the type of the step done is listed.
- The second weakness of the original method was degeneracy of the simplices. This would occur also here.
Therefore a sufficient affine independence of the simplex is tested here numerically using the QR-decomposition of
the simplex matrix
(xi-xl; i < > l)P = Q*R
with unitary Q , permutation matrix P and triangular R, with the diagonal elements of R
monotonically decreasing
in absolute value. (This is not a rank revealing decomposition but found working sufficiently well here, since
the variables need be reasonably scaled anyway in order to obtain good performance).
If the quotient |R(1,1)/R(n,n)| exceeds some preset bound ,then there is a simplex rebuilt
by replacing all columns in the R-matrix with such small diagonal elements
( |R(1,1)/R(i,i)| > bound ) by the corresponding columns of the unit matrix times R(1,1).
If the worst function value in this new simplex is larger than the old f(xh), then a massive symmetric
contraction step is added.
The parameter condbound in the input form is this bound.
- Hence in this method the only descent criterion is strong monotonic descent of the worst function
value in the simplex.
- A. Witzel proves in here dissertation that this method converges for every two times differentiable
function to a stationary value provided that the level set of the first worst point is compact and
contains only finitely many stationary points.
- The following termination reasons might occur in the run:
- 'no more significant change in f' :
the worst function value changes only in the order of roundoff
- 'f falls beyond prescribed lower bound' :
in order to detect possible divergence you must specify a lower bound for
the function. If this is violated, we terminate
- 'simplex diam < diammin' :
the defined lower bound for the diameter (necessary because of roundoff effects)
has been violated
- 'simplex diam > diammax' :
we allow also simplex growth. This error will occur if the level set is
unbounded .
- 'too many steps required' :
the maximum number of steps has been used already without success.
There is a global upper bound of 1000000 for this.
- 'massive contraction fails' :
the largest function value could not be diminished by the massive contraction.
that means that the function behaves locally like a constant.
- 'massive contraction after rebuilt fails' :
same as above, but after a rebuild to a standard simplex in general orientation.
- 'symmetric massive contraction fails' :
along the current grid no smaller function value could be found in both
directions. Probably a local minimizer has been found.
- 'more than 10 very small changes in f' :
the worst function value changed by less than 10-12 (relativ error)
in 10 successive steps. That means that the function behaves too flat in
the current region (a flat saddle point or a very illconditioned minimizer)
- Function values at the vertices of a simplex can be used to construct an approximation
for the gradient of f, which we attribute to the center of gravity of the simplex.
This is known as the ''simplex gradient''.
The changes of this gradient from step to step together with the changes of this center point
may serve to assess second order information (the Hessian) of f. We present the possibility
to do this here in the form of the well known BFGS update (see for this in this chapter).
Given such an approximation of the Hessian and the simplex gradient, we can construct a
direction of descent for f. We attach this at the best point and try a line search along this
direction in backtracking form. If this is successful and the new best point is far
enough (more than half the simplex diameter) from the current simplex, we decide
to reinitialize a new simplex at this new point in a way which does not deteriorate the
worst function value. Hence this can never destroy the convergence properties of the method.
We name this the ''hybrid mode''. Sometimes this is quite useful, especially for larger dimension,
but not always. It increases the algebraic complexity by an O(n^2) process in each step.
You can decide to use this one or the pure Nelder-Mead scheme.
You can decide how often this special step may be tried.
|
| |
- cpu time, ident of testcase and a statistic of the steps done.
Here ''Hcnt=1'' means a step of the original unmodified method.
- The termination reason.
- The computed best values f(xopt) ,
x(1)opt,...,x(n)opt and the so called
''simplex gradient''. This is an approximation to the true gradient using the simplex matrix and the
vector of function differences f(xi)-f(xl).
- If you required the iteration protocol then you get a table showing
step number, worst function value, simplex diameter and type of the step.
Here
''refl'' means reflection, ''exp'' expansion, ''i_contr'' inner and ''o_contr'' outer contraction and
''msc'' massive contraction. The special steps ''smsc'' and simplex rebuilt are indicated separately.
- There are four plots: Logarithm of f - fopt,
number of function values used (as a rule strictly linear and independent on the dimension),
simplex diameter (which demonstrates the dynamic behaviour of the method),
and type of step: 1 means reflection, 2 means expansion, 3 means outer
and 4 inner contraction, 5 massive contraction. The values 6 to 10 have the same meaning for steps directly following
an smsc and the values 11 to 15 the same directly following a simplex rebuilt.
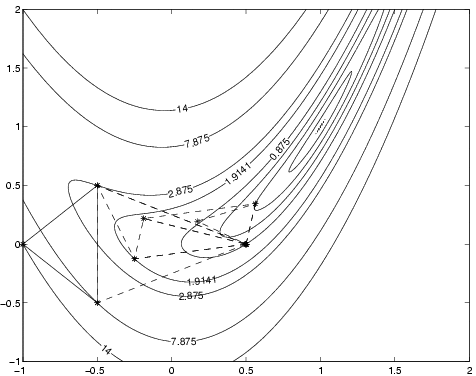
- The contour plot, if required.
|