Test examples of boundary value problems
1 Example1
This is a linear case satisfying strong uniqueness and smoothness conditions. The problem is originally a scalar second order problem:with the unique and arbitrarily smooth solution
This is transformed into the first order system
and we use the true boundary values as initial guess:
Because of this and the linearity in Newton's method finds the true solution in one step (you see only the computed solution on the plot), but in order to detect this it takes a second step.
2 Example2
This is a nonlinear, uniquely solvable, but sensitive case. This is also a scalar second order problem originally,with the unique and arbitrarily smooth solution
This is again transformed into a first order system
If with only one interval the initial value problem would be solved with an initial slope then a singularity of the solution occurs inside and the integrator could not finish his job. We take here 4 subintervals of length 0.5 and use the values of the linear interpolant of the boundary values as initial guesses. The first integration hence yields a discontinuous solution, but Newton's method converges fast and without trouble.
3 Example3
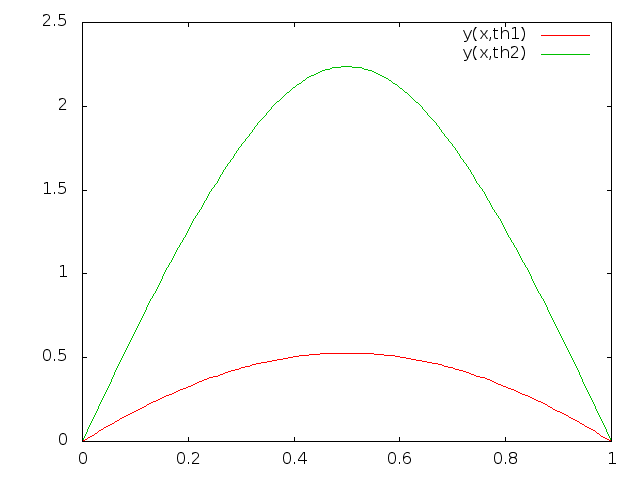
This is a nonlinear nonuniquely solvable case with two smooth solutions. This is also a scalar second order bondary value problemnonlinear as the second example, but this one is not uniquely solvable. It has two solutions
where is one of the two solutions of
These values are for the lower and for the upper solution.
 Again this is transformed to a first order system.
We use
(simple shooting) and the zero function as the default initial solution.
From this Newton's method converges quickly against the lower solution.
Again this is transformed to a first order system.
We use
(simple shooting) and the zero function as the default initial solution.
From this Newton's method converges quickly against the lower solution.
4 Example4
The following is taken from J. Stoer and R. Bulirsch: "Introduction to Numerical Mathematics", volume II, 1973, pages 180-186. This is the famous reentry problem of an APOLLO like space vehicle, solved here under simplifying assumptions: earth is a sphere with radius . The variables describing the flight are speed , the angle between the flight's curve tangent and the tangent to the sphere at the current projection point of the vehicle position on the sphere, the normalized heigth = distance from earth divided by . The equations readHere
is the density of the atmosphere, a constant, mass and the frontal area, and earth acceleration. The physical parameters are feet for space and second for time. Values are
The coefficients (aerodnamical lift and aerodynamical resistance coefficient) describe the influence of a control function which serves for changing during flight (brake flaps). The aim of this control is the minimization of the total heating of the vehicle during the manoeuvre which is given by
The endtime is free. There are initial and end conditions:
and
From variational analysis it follows that this free endtime minimization problem in function space can be solved by requiring
where is the Hamiltonian function
themselves, the multipliers for the constraints on , are again functions, defined by the differential equations
The control is given by
The indices in the vector solution correspond to the appearance of the variables here: is speed, is angle, is normalized height, are the three multipliers for the constraints and represents the endtime with the ode
This is a highly sensitive problem. We use here the initial values given by Deuflhard and coworkers. You may play with the parameter tol but changing the initial values is discouraged.
File translated from TEX by TTM Unregistered, version 4.03.
On 20 Jun 2016, 17:59.